Destiné au déplacement et au chargement de bobines sur cantres pour fil textile et fil métallique.
Ce manipulateur est équipé d'un dispositif de préhension à mandrin à expansion, qui permet une parfaite manipulation pour la prise, le transfert et le chargement de bobines sur cantres.
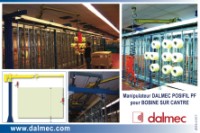
Afin d'accompagner l'opérateur lors de son travail dans la manipulation de bobines de fil sur cantres dans des conditions optimales de sécurité et d'ergonomie, le manipulateur DALMEC type POSIFIL PF est équipé d'un dispositif de préhension à mandrin à expansion, qui permet une parfaite manipulation en absence totale de poids, pour la prise, le transfert et le chargement de bobines de fil sur cantres.
Pourvu d'un structure à double bras articulé, le manipulateur DALMEC POSIFIL PF est particulièrement adapté pour permettre la manipulation de charges en porte-à-faux. Ainsi, tous les mouvements dans l'espace sont libres, obtenus par action directe de l'opérateur sur la charge, conférant aux gestes la précision parfaite nécessaire au positionnement des bobines de fil sur cantre, et ce, avec une manipulation zéro effort .
Ce type de manipulateur à bras articulé se caractérise notamment par sa grande maniabilité et souplesse d'utilisation. Il est l'instrument idéal pour les manipulations de charges moyennes comme les bobines sur cantres, en absence d'effort, avec rapidité et précision, et dans des conditions optimales d'ergonomie et de sécurité.
La conception de l'équipement, a intégré l'ensemble des contraintes du poste de travail comme la hauteur particulièrement réduite d'un local, la nécessité de charger les bobines sur toute la longueur des cantres, et la course verticale nécessaire pour accéder aux différents axes de chargement.
Les outils de préhension associés ont été conçus et réalisés aux mesures de la charge à manipuler et des contraintes liées à l'accessibilité du produit et d'une manipulation axée comme en porte-à-faux. L'équilibrage de la charge est obtenu par l'effet d'un vérin pneumatique à air comprimé, sur un système à leviers.
Celui-ci couplé à un système de double câblage, amplifie l'action de montée et de descente qui est appliquée manuellement par l'opérateur sur l'outil de préhension ou directement sur la charge.
Le vérin est alimenté par deux circuits préréglés : le premier équilibre en permanence l'outil de préhension, le second équilibre le poids de la charge. Le principe d'utilisation est basé sur l'équilibrage de la charge rendant ainsi libre tout mouvement dans l'espace.
Aussi, Le mouvement vertical est obtenu par simple action de l'opérateur vers le haut ou vers le bas. L'opérateur maîtrise tous les mouvements imprimés à la charge avec des manipulations à la fois précises et sûres.
Ce manipulateur est équipé d'un dispositif de préhension à mandrin à expansion, qui permet une parfaite manipulation pour la prise, le transfert et le chargement de bobines sur cantres.
Afin d'accompagner l'opérateur lors de son travail dans la manipulation de bobines de fil sur cantres dans des conditions optimales de sécurité et d'ergonomie, le manipulateur DALMEC type POSIFIL PF est équipé d'un dispositif de préhension à mandrin à expansion, qui permet une parfaite manipulation en absence totale de poids, pour la prise, le transfert et le chargement de bobines de fil sur cantres.
Pourvu d'un structure à double bras articulé, le manipulateur DALMEC POSIFIL PF est particulièrement adapté pour permettre la manipulation de charges en porte-à-faux. Ainsi, tous les mouvements dans l'espace sont libres, obtenus par action directe de l'opérateur sur la charge, conférant aux gestes la précision parfaite nécessaire au positionnement des bobines de fil sur cantre, et ce, avec une manipulation zéro effort .
Ce type de manipulateur à bras articulé se caractérise notamment par sa grande maniabilité et souplesse d'utilisation. Il est l'instrument idéal pour les manipulations de charges moyennes comme les bobines sur cantres, en absence d'effort, avec rapidité et précision, et dans des conditions optimales d'ergonomie et de sécurité.
La conception de l'équipement, a intégré l'ensemble des contraintes du poste de travail comme la hauteur particulièrement réduite d'un local, la nécessité de charger les bobines sur toute la longueur des cantres, et la course verticale nécessaire pour accéder aux différents axes de chargement.
Les outils de préhension associés ont été conçus et réalisés aux mesures de la charge à manipuler et des contraintes liées à l'accessibilité du produit et d'une manipulation axée comme en porte-à-faux. L'équilibrage de la charge est obtenu par l'effet d'un vérin pneumatique à air comprimé, sur un système à leviers.
Celui-ci couplé à un système de double câblage, amplifie l'action de montée et de descente qui est appliquée manuellement par l'opérateur sur l'outil de préhension ou directement sur la charge.
Le vérin est alimenté par deux circuits préréglés : le premier équilibre en permanence l'outil de préhension, le second équilibre le poids de la charge. Le principe d'utilisation est basé sur l'équilibrage de la charge rendant ainsi libre tout mouvement dans l'espace.
Aussi, Le mouvement vertical est obtenu par simple action de l'opérateur vers le haut ou vers le bas. L'opérateur maîtrise tous les mouvements imprimés à la charge avec des manipulations à la fois précises et sûres.